
組み込みシステムやIoT機器の開発において、限られたハードウェアリソースで複数の処理を効率よくリアルタイムに処理するために欠かせないのが「RTOS(リアルタイムオペレーティングシステム)」です。
その中でも、世界中で圧倒的なシェアを誇るのがFreeRTOSです。
本記事では、FreeRTOSが多くの分野で選ばれる理由から、開発の肝となる設定ファイル FreeRTOSConfig.h の役割、さらに「プリエンプティブ方式」と「コ・オペレーティブ方式(協調型)」という2大スケジューラの違いをPlantUMLの図解付きで分かりやすく解説します!
FreeRTOSとは?多くの分野で活用される理由
FreeRTOS(Free Real-Time Operating System)は、マイクロコントローラ(MCU)などのリソース制限が厳しい環境向けに設計された、オープンソースのリアルタイムOSです。
なぜFreeRTOSが選ばれるのか?
- 完全無料で商用利用が可能:MITライセンス(またはFreeRTOSオープンソースライセンス)で提供されており、ロイヤリティフリーで商用製品に組み込むことができます。
- 圧倒的な軽量・高性能:カーネルのコアサイズが数キロバイト程度と非常に小さく、メモリ(ROM/RAM)を圧迫しません。
- 幅広いマイコンへの対応:ARM Cortex-M、RISC-V、ESP32、PICなど、主要な多くのアーキテクチャで使用可能
活用されている主な分野・業界
FreeRTOSはその高い信頼性から、現在では以下のような非常に幅広い分野で活用されています。
- スマート家電・IoTデバイス:Wi-FiやBluetooth通信と、機器の制御を並行して行うスマートロックやエアコンなど。
- 産業用ロボット・制御機器:工場の製造ラインやモーター制御など、1ミリ秒の遅れも許されないリアルタイム性が求められる環境。
- 車載インフォテインメント・補助制御:カーナビや車内の各種センサー情報の集約。
- 医療機器・ヘレスケアガジェット:信頼性が最優先される測定機器やウェアラブルデバイス。
開発の要となる設定ファイル FreeRTOSConfig.h
FreeRTOSを使ってアプリケーションをビルドする際、必ず用意しなければならないのが FreeRTOSConfig.h というヘッダーファイルです。
FreeRTOSは非常に多機能ですが、すべての機能を有効にするとコードサイズが大きくなり、メモリを消費してしまいます。そこで、このファイル内でマクロ(#define)を定義することにより、必要な機能だけを有効化(Config設定)し、システムに最適化された軽量なカーネルを生成します。
例えば、以下のような項目をこのファイルで設定します。
- システムのクロック周波数(
configCPU_CLOCK_HZ) - タスクに割り当てられる最大優先度(
configMAX_PRIORITIES) - ソフトウェアタイマーやミューテックスを使用するかどうかの選択
- スケジューラ方式の切り替え(
configUSE_PREEMPTION)
【図解】2つのスケジューラ方式:プリエンプティブ vs コ・オペレーティブ
FreeRTOSConfig.h の設定項目の中で、システムのリアルタイム性を決定づける最も重要な設定が、タスク(処理)の切り替えルールを決めるスケジューラ(configUSE_PREEMPTION)の設定です。
FreeRTOSでは、主に以下の2つの方式から選択します。
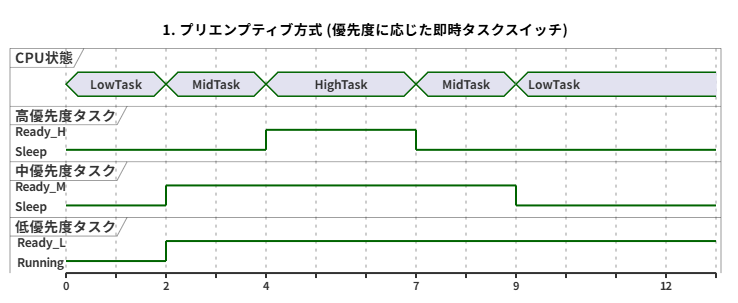
プリエンプティブ方式(先取り型)
- 設定:
configUSE_PREEMPTION = 1 - 特徴: 現在実行中のタスクよりも優先度の高いタスクが実行可能状態になった瞬間、OSが強制的にタスクを切り替える方式です。
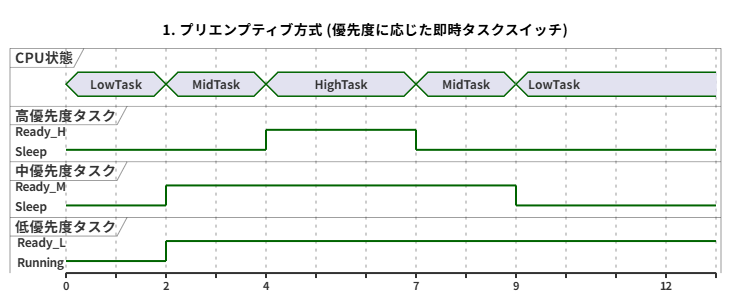
- メリット: 割り込みや外部イベントに対して即座に反応できるため、極めて高いリアルタイム性を発揮します。一般的なRTOS開発では、このプリエンプティブ方式が主流です。
- 注意点: タスクが「予期せぬタイミング」で中断されるため、共通の変数やリソースを書き換える際にデータが壊れないよう、適切な排他制御(セマフォやミューテックス)を行う必要があります。
コ・オペレーティブ方式(協調型)
- 設定:
configUSE_PREEMPTION = 0 - 特徴: 実行中のタスクが自ら処理を譲る(明示的に待ち状態になる、またはタスク切り替えを要求する)まで、他のタスクに実行権が移らない方式です。
- メリット: タスクが勝手に切り替わらないため、データ共有時の競合(排他制御の問題)が起きにくく、プログラムの設計やデバッグがシンプルになります。
- 注意点: 1つのタスクが処理を占有し続け(無限ループなど)、自ら処理を譲らないと、他の優先度が高いタスクであっても一切実行されません。全体のタイムマネジメントを開発者が慎重に設計する必要があります。
FreeRTOSの主な便利機能一覧
FreeRTOSはタスクの管理だけでなく、マルチタスク環境において安全かつスムーズにデータをやり取りしたり同期したりするための豊富な機能を標準で備えています。
| 機能名 | 概要・役割 |
| タスク管理 | 複数の処理(タスク)に優先度をつけて管理し、CPUのリソースを分配して擬似的に並行動作させる基本機能。 |
| キュー (Queues) | タスク間で安全にデータ(メッセージ)を通信・共有するためのFIFO(先入れ先出し)バッファ。 |
| セマフォ (Semaphores) | タスク間の同期(イベント通知)や、共通リソースへのアクセス制限に利用。「バイナリ」と「カウンティング」がある。 |
| ミューテックス (Mutexes) | 優先度逆転問題を防止する「優先度継承プロトコル」を備えた、排他制御(共有リソースの同時アクセス防止)専用のセマフォ。 |
| ソフトウェアタイマー | ハードウェアのタイマーリソースを消費せず、指定時間が経過した後に特定の関数(コールバック)を実行する機能。 |
| イベントグループ | 複数のイベントフラグの状態を組み合わせ、特定の条件(例:「フラグAとBが両方揃ったら実行」)でタスクを同期・再開させる機構。 |
| ストリーム/メッセージバッファ | タスク間、または割り込みサービスルーチン(ISR)からタスクへ、連続したデータやメッセージを高速に転送するための軽量バッファ。 |
まとめ:要件に合わせて最適な設定を
FreeRTOSは、「無料で使える手軽さ」と「産業用途にも耐えうる高い信頼性」を兼ね備えた、組み込み開発のスタンダードOSです。
開発するシステムの要件(リアルタイム性を最優先するのか、設計のシンプルさを優先するのか)に合わせて、FreeRTOSConfig.h で「プリエンプティブ方式」と「コ・オペレーティブ方式」を正しく使い分けることが、マイコンの性能を最大限に引き出す鍵となります。
これからIoT機器や高度な組み込み制御に挑戦する方は、ぜひFreeRTOSを活用してみてください!

コメント